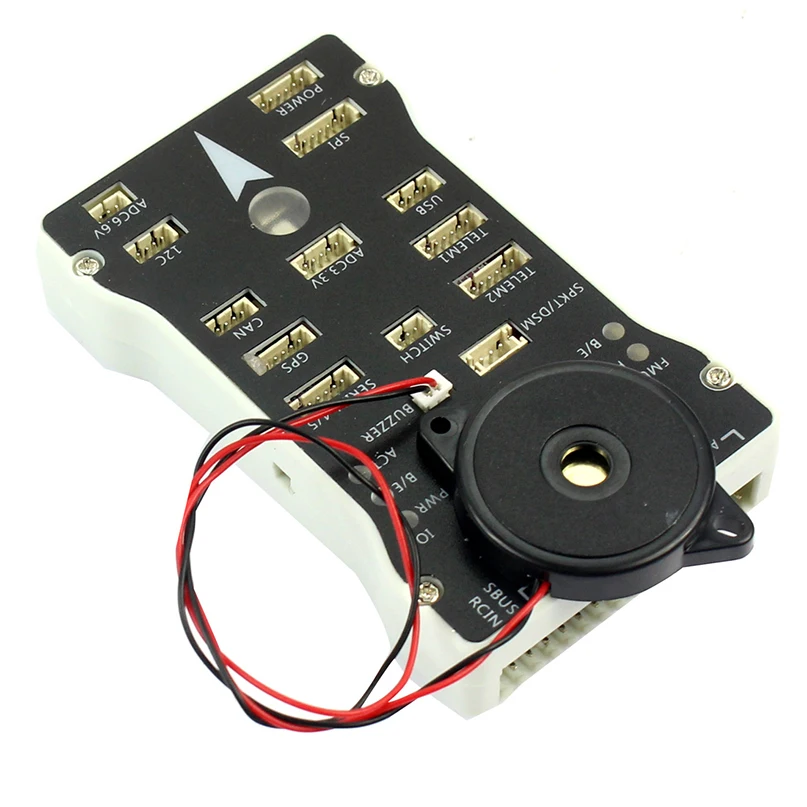
QwinOut Pixhawk PIX 2.4.8 32 Bit PX4 Autopilot Flight Control with PX4FMU PX4IO Safety Switch Buzzer 1G SD for DIY RC Drone Multirotor
QWinOut
Sale price
$107.61
Regular price
$161.42
QwinOut Pixhawk PIX 2.4.8 32 Bit PX4 Autopilot Flight Control with PX4FMU PX4IO Safety Switch Buzzer 1G SD for DIY RC Drone Multirotor
Note:
Open source products, once sold, no return, if quality problems, Please return for repair . Does not provide one to one support. Buy carefully!
If you are using a PWM receiver, please ready a PWM / PPM converter.
Description:
- The board integrates with PX4FMU+PX4IO
- Pixhawk is with new 32 bit chip and sensor technology
Features:
- Advanced 32 bit CortexM4 ARM high performance processor, can run RTOS NuttX real time operating system;
- 14* PWM/ actuator output;
- Bus interface (UART, I2C, SPI, CAN);
- Integrated backup power supply and failure backup controller, the main controller can be safely switched to backup control;
- Provide automatic and manual mode;
- Provide redundant power input and fault transfer function;
- Color LED lamp;
- Multi tone buzzer interface;
- Micro SD to record flight data;
Processor:
- 32 bit 2M flash memory STM32F427 Cortex M4, with hardware floating point processing unit
- Main frequency: 256K, 168MHZ RAM
- 32 bit STM32F103 backup co processor
Sensor:
- L3GD20 3 axis digital 16 bit gyroscope
- LSM303D 3 axis 14 bit accelerometer /magnetometer
- MPU6000 6 axis accelerometer / magnetometer
- MS5611 high precision barometer
Interface:
- 5* UART, 1*compatible high voltage, 2*hardware flow control
- 2* CAN
- DSM/DSM2/DSM-X satellite receiver compatible input
- Futaba SBUS compatible input and output
- PPM signal input
- RSSI (PWM or voltage) input
- I2C
- SPI
- 3.3 and 6.6VADC input
- External USB MICRO interface
Package included:
- 1 x 2.4.8 Pixhawk main control
- 1 x Flight control shell
- 1 x Safety switch
- 1 x Buzzer
- 1 x 6pin to 6pin line
- 1 x 4Pin to 4Pin line
- 1 x 3pin DuPont line
- 1 x 1G SD Card