













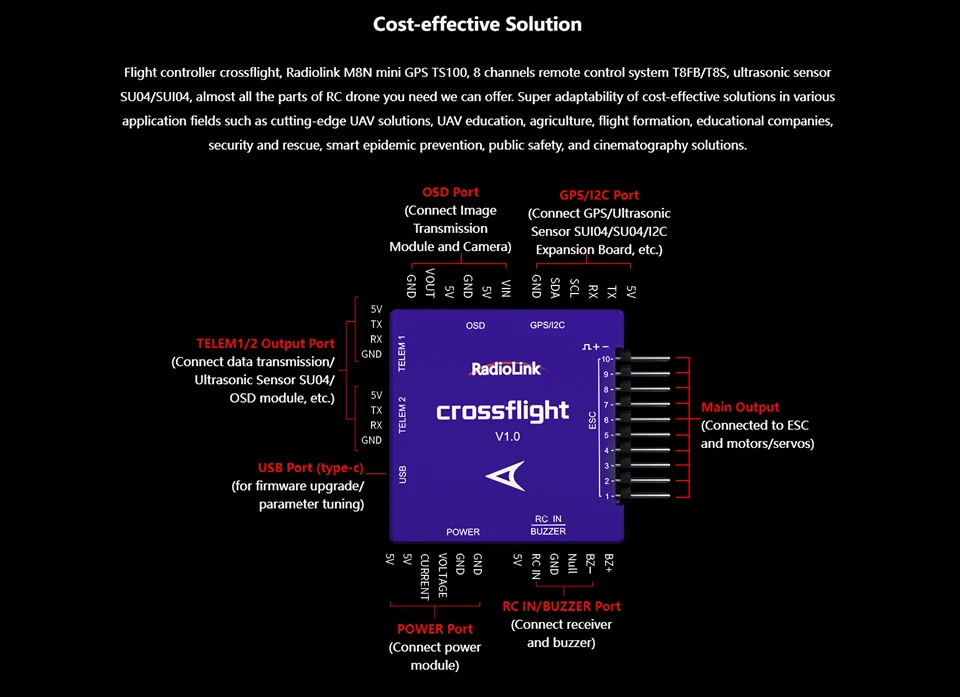
RadioLink Crossflight Flight Controller FC OSD Integrated 10CH PWM Output For RC FPV Drone Helicopter Airplane Car Boat
Radiolink
Sale price
$56.81
Regular price
$85.22
Shipping calculated at checkout.
Crossflight FC Main Features:





Thank you for you choose our product , we are trustworthy ,if you have any questions ,please message us freely , we would like to try our best to solve your issue .
