















Holybro DroneCAN M8N / M9N GPS BMM150 Compass LED For RC Drone Airplane Quadcopter For Pixhawk 6C Flight Controller
Holybro
Sale price
$119.20
Regular price
$178.80
Shipping calculated at checkout.
Holybro DroneCAN M8N / M9N GPS BMM150 Compass LED For RC Drone Airplane Quadcopter Pixhawk 6C Flight
Control
The M9N GPSuses multi-constellation GNSS powered by u-blox M9N, a concurrent GNSS receiver which can receive and track multiple GNSS systems. Owing to the multi-band RF front-end architecture all four major GNSS constellations, GPS,Galileo, GLONASS and BeiDou can be received concurrently.
It also comes with the IST8310 compass, tricolored LED indicator, buzzer, and a safety switch. There are 3 different connectors options for different purposes. This module ships with a baud rate of 115200 (38400 previously).
The high-gain 25 x 25 mm2 patch antenna provides excellent performance and the omnidirectional antenna radiation pattern increases flexibility for device installation. It features active circuitry for the ceramic patch antenna, rechargeable backup battery for warm starts.
Feature
-
Ublox M9N GNSS Reciever
-
Accurate Positioning
-
Fast Navigation Update Rate
-
IST8310 Compass
-
High-gain 25*25*4mm antenna
-
Internal Buzzer, Safety switch
-
Ultra Bright UI RGB LED
|
|
Holybro M10 GPS |
Holybro M9N GPS |
GNSS Receiver |
Ublox M10 |
Ublox M9N |
Number of Concurrent GNSS |
Up to 4 GNSS |
Up to 4 GNSS |
BeiDou |
BeiDou |
|
Galileo |
Galileo |
|
GLONASS |
GLONASS |
|
GPS |
GPS |
|
QZSS |
QZSS |
|
Frequency Band |
GPS L1 |
GPS L1 |
Galileo E1 |
Galileo E1 |
|
GLONASS L1 |
GLONASS L1 |
|
BeiDou B1 |
BeiDou B1 |
|
SBAS L1 |
SBAS L1 |
|
QZSS L1 |
QZSS L1 |
|
Compass |
IST8310 |
IST8310 |
Output Protocol |
UBX (U-blox) |
UBX (U-blox) |
NMEA |
NMEA |
|
Accuracy |
2.0m CEP |
1.5m CEP |
Nav. Update Rate |
Up to 25 Hz (single GNSS), |
Up to 25 Hz (4 concerrent GNSS) |
Up to 10 Hz (4 concurrent GNSS) |
||
GNSS Augmentation System |
EGNOS, GAGAN, MSAS and WAAS |
EGNOS, GAGAN, MSAS and WAAS |
QZSS: L1S |
QZSS: L1S |
|
Default Baud Rate |
115200 |
115200 |
Input Voltage |
4.7-5.2V |
4.7-5.2V |
Port Type |
JST-GH-10P |
JST-GH-10P |
Antenna |
25 x 25 x 4 mm ceramic patch antenna |
25 x 25 x 4 mm ceramic patch antenna |
Power consumption |
Less than 200mA @ 5V |
Less than 200mA @ 5V |
Operating Temperature |
-40~80C |
-40~80C |
Dimension |
φ50 x14.4 mm |
φ50 x14.4 mm |
Weight |
32g |
32g |
Cable Length |
26cm (42cm cable purchase separately) |
26cm (42cm cable purchase separately) |
Other |
Tri-color LED |
Tri-color LED |
Onboard Buzzer |
Onboard Buzzer |
|
Safety Switch |
Safety Switch |
|
LNA MAX2659ELT+ RF Amplifier |
LNA MAX2659ELT+ RF Amplifier |
|
Rechargeable Farah capacitance |
Rechargeable Farah capacitance |
|
Low noise 3.3V regulator |
Low noise 3.3V regulator |
Ardupilot User: If unable to preform normal compass calibration "compass dance" for any reason, set parameter COMPASS_ORIENT=6 (Yaw270) for proper compass orientation.
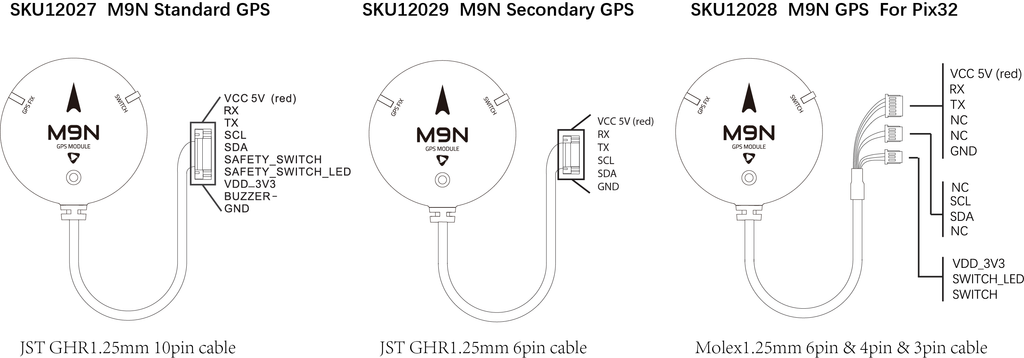
PIN MAP
Package Includes:
1x M9N GPS Module
1x Fixed Carbon Fiber GPS mount







Description:
The Holybro DroneCAN GPS has an UBLOX M8N or M9N module, BMM150 compass, tri-colored LED indicator. It has the STM32G4 Processor and adopted the DroneCAN protocol for communication, making it more reliable and better in dealing with electromagnetic interference compare to serial connection. It does not occupy any serial port of the flight controller, and different CAN devices can be connected to the same CAN bus via a CAN splitter board.
Features & Comparison:
|
|
DroneCAN M8N |
DroneCAN M9N (Coming Soon) |
GNSS Receiver |
Ublox NEO M8N |
Ublox NEO M9N |
Number of Concurrent GNSS |
2 (Default GPS + GLONASS) |
4 (Supports Beidou, Galileo, GLONASS, GPS) |
Processor |
STM32G4 (170MHz, 512K FLASH) |
STM32G4 (170MHz, 512K FLASH) |
Compass |
BMM150 |
BMM150 |
Frequency Band |
GPS: L1C/A GLONASS: L10F Beidou: B1I Galileo: E1B/C |
GPS: L1C/A GLONASS: L10F Beidou: B1I Galileo: E1B/C |
GNSS Augmentation System |
SBAS: WAAS, EGNOS, MSAS, QZSS |
SBAS: WAAS, EGNOS, MSAS
|
Navigation Update |
5Hz Default(10Hz MAX) |
5Hz Default(25Hz MAX) |
Accuracy |
2.5m |
2.0m (up to 0.7m) |
Speed Accuracy |
0.05 m/s |
0.05 m/s |
Max # of Satellites |
22+ |
32+ |
Communication Protocol |
DroneCAN @ 1 Mbit/s |
DroneCAN @ 1 Mbit/s |
Supports Autopilot FW |
PX4, Ardupilot |
PX4, Ardupilot |
Port Type |
GHR-04V-S |
GHR-04V-S |
Antenna |
25 x 25 x 4 mm ceramic patch antenna |
25 x 25 x 4 mm ceramic patch antenna |
Power consumption |
Less than 200mA @ 5V |
Less than 200mA @ 5V |
Voltage |
4.7-5.2V |
4.7-5.2V |
Operating Temperature |
-40~80C |
-40~80C |
Size |
Diameter: 54mm Thickness: 14.5mm |
Diameter: 54mm Thickness: 14.5mm |
Weight |
36g |
36g |
Cable Length |
26cm |
26cm |
Other Notes |
- LNA MAX2659ELT+ RF Amplifier
|
- LNA MAX2659ELT+ RF Amplifier
|
DroneCAN
DroneCAN is the primary CAN protocol used by the ArduPilot and PX4 projects for communication with CAN peripherals. It is an open protocol with open communication, specification and multiple open implementations.






