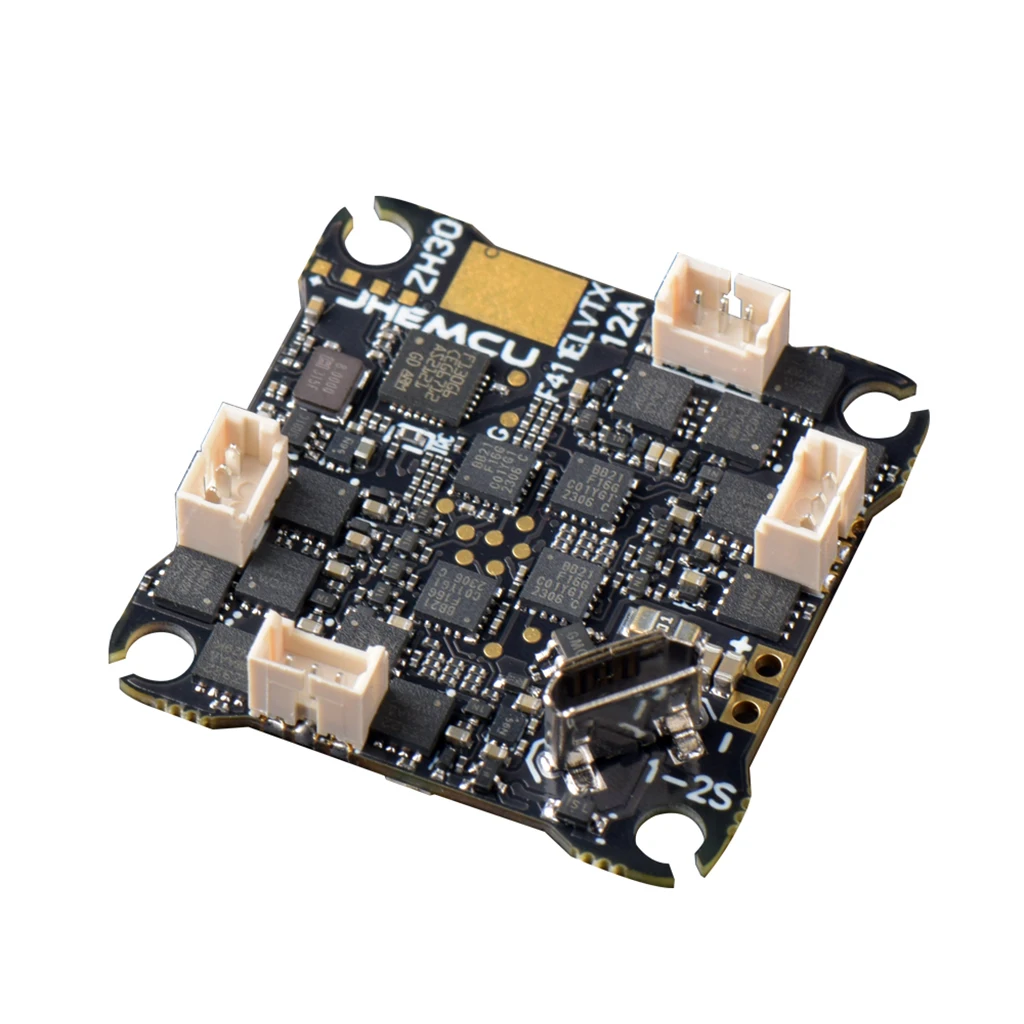
JHEMCU F411ELVTX 1S-2S AIO Flight Control/ ELRS Receiver / 12A 4in1 ESC / 48CH 0-400mW VTX 25.5MM Hole For FPV Racing Drone
JHEMCU
Sale price
$68.76
Regular price
$103.14
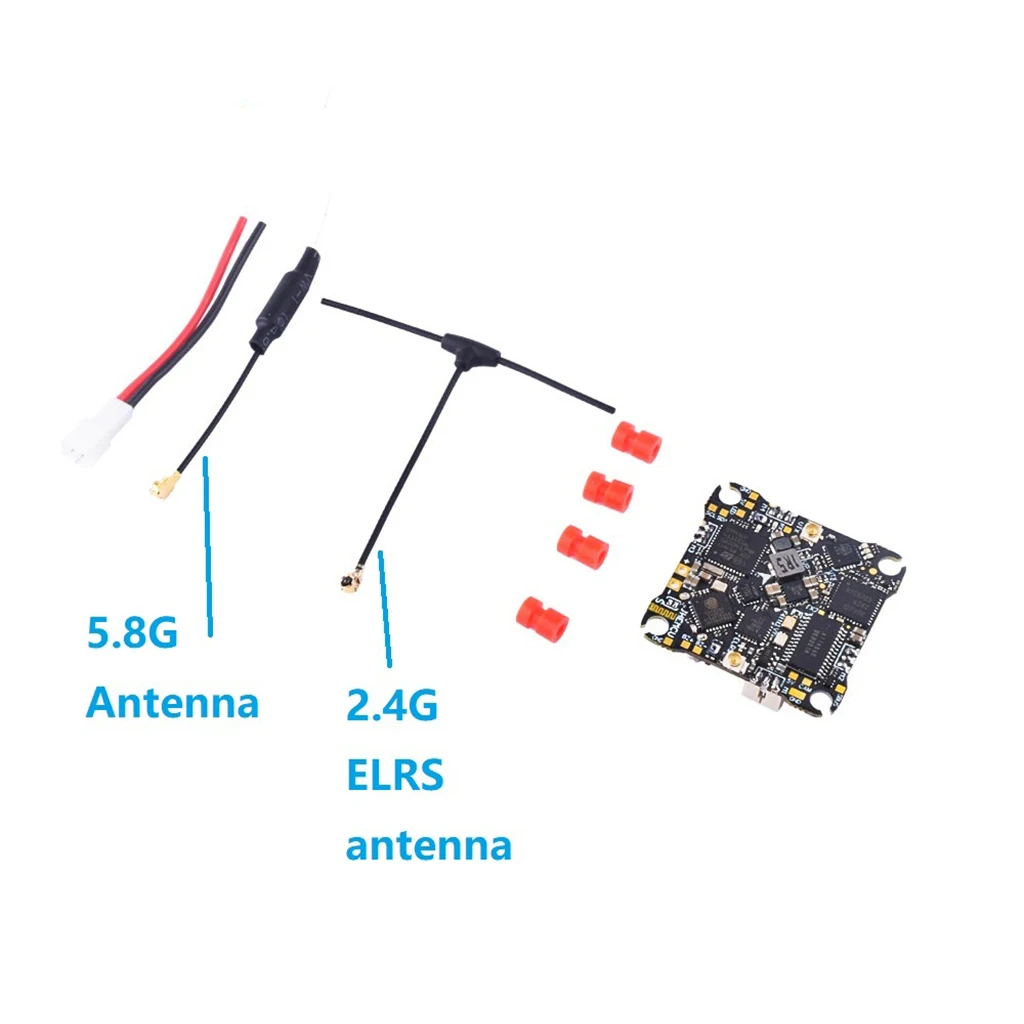
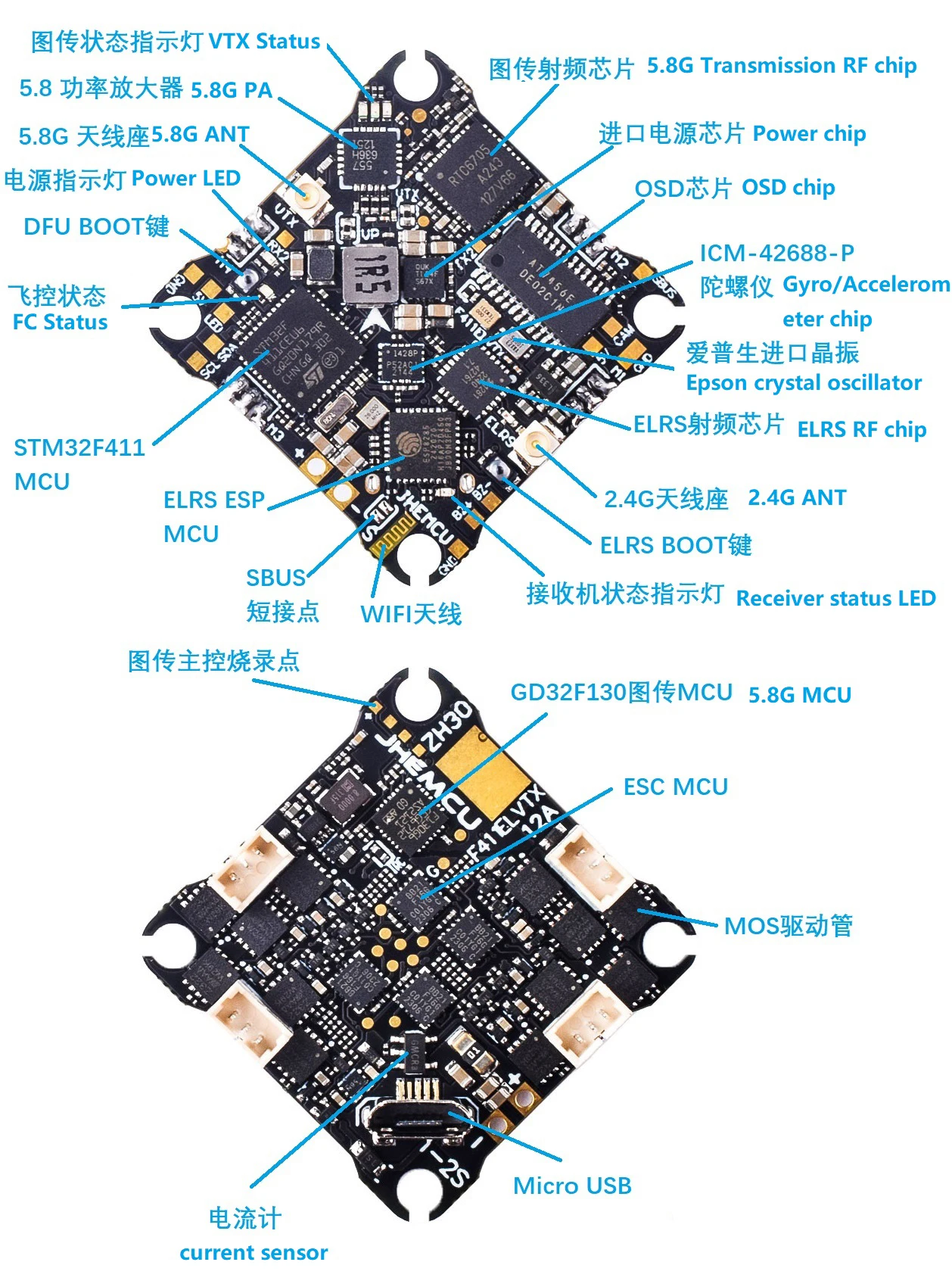
JHEMCU F411ELVTX, using STM32F411 processor, ICM42688-P gyroscope, integrated OSD, built-in 5V/1.5A BEC, built-in independent ELRS 2.4G receiver, built-in VTX 5.8G 400MW image transmission module, support 1-2S 12A brushless ESC quad. The board does not have a black box and barometer module. If you choose 1S power supply and encounter difficulties in starting the motor, please adjust the starting power value to an appropriate increase to the value that can be started. The AIO video transmission does not have the Low Power Disarm function enabled by default (it can be understood that the unlocked image transmission is the maximum power, and the locked image transmission is the minimum power, which can reduce the temperature of the PCB during switching). If the built-in ELRS is not used, an external SBUS receiver can be supported.
Technical parameters:
Model: JHEMCU F411ELVTX
Main control chip: STM32F411CEU6 (100MHZ, 512K)
Gyroscope: ICM-42688-P
Barometer: None
OSD chip: AT7456E
Black Box: None
LED programming: Yes
BB Ring: Yes
Input voltage: 1-2S
I2C interface: Yes
BEC:5V/1.5A
Camera input: Yes
Serial control port: two (UART1 for internal ELRS receiver and external SBUS, UART2 for internal 5.8G VTX Smart Audio)
Flight controller firmware: Betaflight 4.4.2 JHEF411. HEX
ESC current: 12A*4
Galvanometer: Yes
Firmware: BLHELI_S Z-H-30. HEX
Support for Bluebird: Support 24K 48K 96K
The default ESC drive protocol of the flight controller: DSHOT300
Receiver type: ELRS
Receiver frequency: 2.4G
Receiver signal protocol: CRSF
Receiver firmware: JHEMCU EP24. V3.0.0
Whether to support WIFI update ELRS firmware: Yes
Video transmission frequency: 5.8G
Video transmission channel: 48CH
Image transmission power: 25mw, 100mw, 200mw, 300mw, 400MW
OSD tuning protocol: Smart Audio
Hole position and shock absorbing ball hole position conversion: M3, 25.5*25.5MM
Maximum dimensions: 30*30MM
Weight: 4.4g