



























QWinOut DIY Quadcopter RC FPV Drone S600 Frame Full Kit with APM 2.8 No Compass Flysky FS-i6 TX Battery Charger Motor 40A ESC
QWinOut
Sale price
$356.35
Regular price
$534.53
QWinOut DIY RC Drone 4 Axle FPV S600 Frame Kit with APM 2.8 No Compass Flysky FS-i6 TX Battery Charger 700KV Motor 40A ESC XT60
Package Listing :
S600 4-Axis Rack Quadcopter Frame Kit with Landing Gear Skid F450 Frame Upgraded*1
40A Brushless ESC Speed Controller *4
HYD 3508 700KV 198W Disc Motor*4
15x5.5 3K Carbon Fiber Propeller CW CCW 1555 CF Prop*2 Pairs
APM2.8 No Compass Flight Controller Board Bent Pin with Case *1
NEO-7M 7M GPS Module with Compass *1
CNC GPS Anti-interference Antenna Mount Holder Stent Case*1
5pcs 10cm Servo Receiver Extension Lead Wire Cable M/M *1
Thick Gold Plated 3.5mm Bullet Connector ( banana plug ) *12
Hook & Loop Fastening Tape *1
Flysky FS-i6 6CH 2.4G AFHDS 2A LCD Transmitter iA6 Receiver *1
IMAX RC B3 Pro Compact Balance Charger *1
11.1V 4400MAH 30C 3S1P T Plug Battery *1
Frame Specifications:
Wheelbase: 600mm
Weight: 590g
Color: Black
Rack plate thickness: 1.6mm
Motor installation size: 16mm, 26mm
improvement
1. Built-in power distribution board
2. Added flight control shock absorber plate
APM Description :
---- With Protective case but no Shock Absorber! For the detail connection and programming, please contact me directly for that.
Size: 70*45*13.5
Weight: 28G
APM is an open source flight control, can you play APM well depend on individual ability. Player must have ability of basic understanding of monolithic integrated circuit, c-language, knowledge of electrical,mechanical, and also needs a certain degree of mental capacity, financialand material resources, energy support.If you're not ready, then We recommend that you prepare some introductory information first.
Introduction:
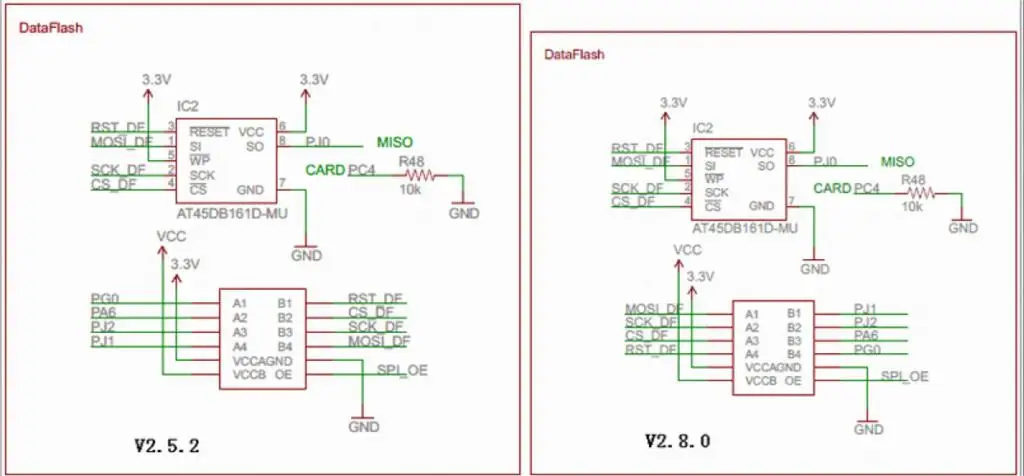
Eliminate V2.52 Version Old 1.0mm 6P SM06B GPS interface , changed to the DF13-4P compass external I2C interface, Place the DF13-5P GPS interface with external interfaces of the compass , more convenient to connections GPS with external compass.
Replaced the V2.52 I2C interface to multi-purpose MUX interfaces, which can be used by the users themselves through the Pad of Back Board freely configurable function output, UART0,UART2,I2C,OSD optional, defaults OSD interface, avoiding 2.52 version when you want to use both Data Transmission and OSD, you need to use Y-line separating the interface programme. Improved OSD interface when used in conjunction with Data Transmission, because of the isolation resistance, more effective to avoid the interference of Data Transmission.
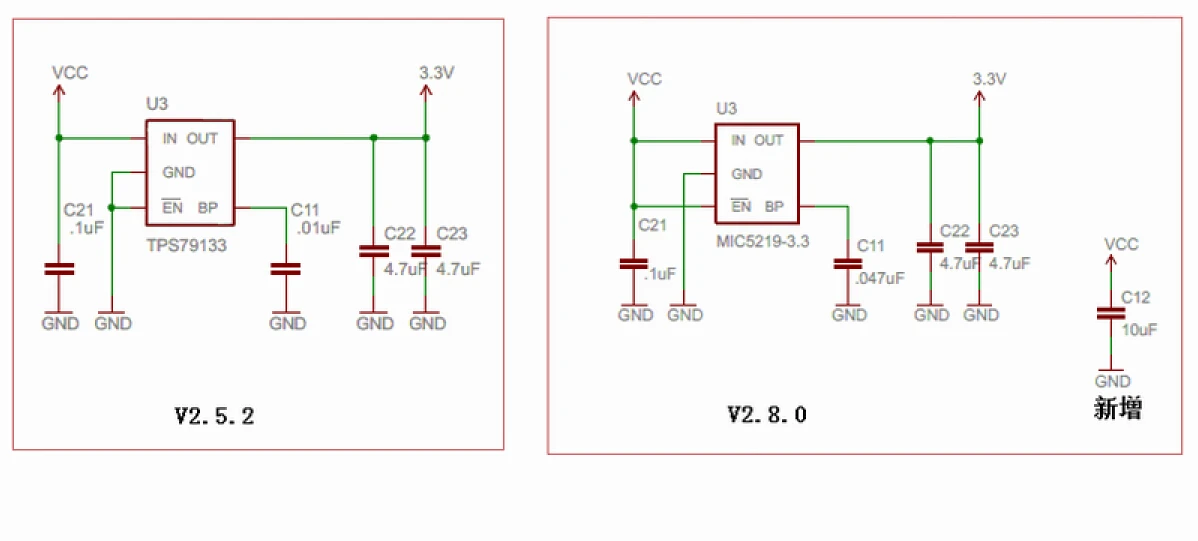
New V2.8.0 use United States semi-LP2985-3.3, pressure-resistant up to 16V, increased reliability, reduced probability of Bad Gyro health due to voltage problems.
Features:
- Arduino Compatible!
- Can be ordered with top entry pins for attaching connectors vertically, or as side entry pins to slide your connectors in to either end horizontally
- Includes 3-axis gyro, accelerometer and magnetometer, along with a high-performance barometer
- Onboard 4 MegaByte Dataflash chip for automatic datalogging
- Optional off-board GPS, uBlox LEA-6H module with Compass.
- One of the first open source autopilot systems to use Invensense's 6 DoF Accelerometer/Gyro MPU-6000.
- Barometric pressure sensor upgraded to MS5611-01BA03, from Measurement Specialties.
- Atmel's ATMEGA2560 and ATMEGA32U-2 chips for processing and usb functions respectively.
1. data transmission port
2. analog sensor port
3. autostability gimbal output
4. ATMEGA2560 SPI online programming port (be useful for optical flow sensor)
5. USB port
6. remote control input
7. function selection jumper
8. GPS port
9. 12C external compass port
10. ATMEGA32U2 SPI online programming port
11. multifunction configurable MUX port (OSD is the defaulted output)
12. current voltage port
13. ESC power supply selection jumper
14. ESC output port







