











JMT APM 2.5 2.6 2.8 Optical Flow Sensor V10 No GPS Fixed Point for Improving Flight Control Precision
JMT
Sale price
$16.06
Regular price
$24.09
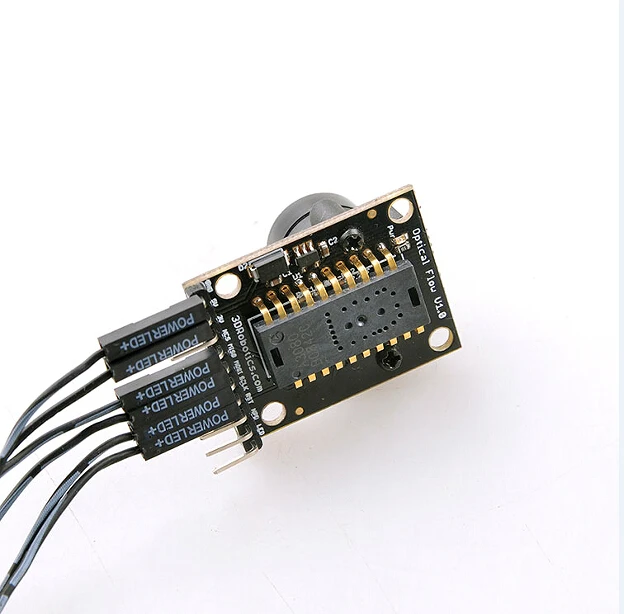
APM 2.5 2.6 2.8 Optical Flow Sensor V10 No GPS Fixed Point for Improving Flight Control Precision
Note:Technical support is not provided.
Description:
- To improve the precision when you can't use GPS, APM: Copter now support optical Flow V1.0 based on mouse sensor
Probelms:
- Sensor can only work under good lighting condition
- Using fixed foucus lens, so it cannot focus lens of objects that within 30cm
- Rotate sensor will make sensor in disorder
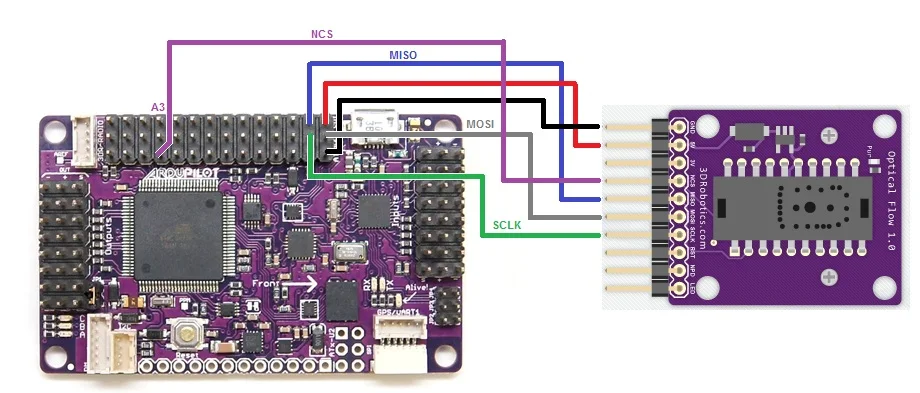
Connecting sensor to APM2.5, APM2.52, APM2.6, APM2.8 all can be used
- Connecting with VCC, GND, MISO, MOSI, SCLK, and NCS pins
- Default installation mode is the camera heads down, the pins heads forward
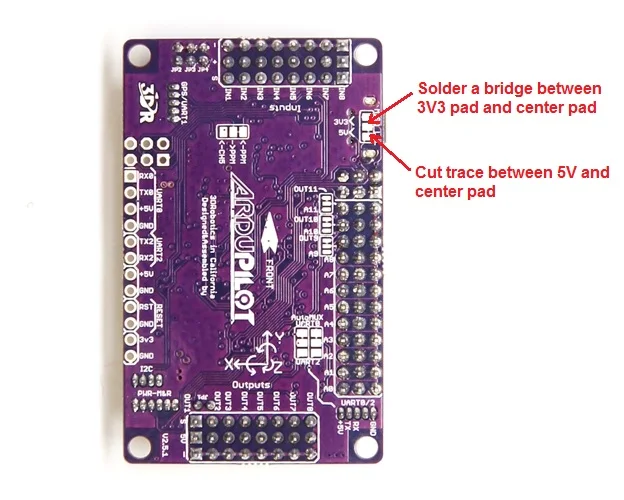
- Disconnect with MISOLVL jumping cable on the back of the board, rewelding the MISO pins at 3.3V voltage. In this way, it won't inteference MPU6000
Testing sensor:
- Update testing sketch to APM:
- If you use APM2, you can download hex files at download zone, then use Mission Planner's original setting> Install Firmware> Load custom firmware connections to your APM2
- If you use APM1, you need to open Arduino IDE and loading AP_OpticalFlow_test.pde, and update it toyour APM1
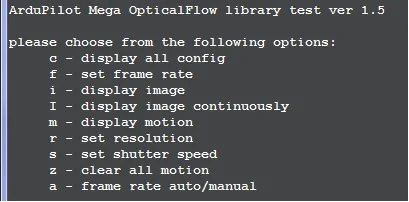
- Using serial port monitor or AP Mission Planner terminal to connect with APM
- Input 'c', to make sure sthe sensor will respond APM
- Input 'm&apos, start the front or back camera, check the changes of X Y value. If ther is no change, rotate the lens to adjust focal distance
Package included:
APM 2.5 2.6 2.8 Optical Flow Sensor V10 x 1
