QWinOut J630 DIY 2.4GHz 4-Aixs RC Drone 630mm Frame Kit APM2.8 Flight Controller with AT9S TX RX Brushless Motor ESC Altitude Hold Quadcopter
QWinOut
Sale price
$382.68
Regular price
$574.02
DIY 2.4GHz 4-Aixs RC Drone 630mm Frame Kit APM2.8 Flight Controller with AT9S TX RX Brushless Motor ESC Altitude Hold Quadcopter
NO Battery Charger Set
Specifications:
Wheelbase:630mm
Size(L*W*H):510*510*255mm
Power Supply: 700KV Brushless Motor 3508 / 40A ESC
Propellers: 1555 Carbon Fiber Propellers
Flight Control/GPS: APM 2.8 / M7N GPS
Remote Distance :About 3000M ( Depends on Enviromental ,outdoor fly)
Remote controller: 9CH Radiolink At9s Transmitter
Battery Recommand (Not Include ): 11.1V 4400MAH 30C ,XT60 Plug
Flight Time : 12 mins-15mins ( Depends on Enviromental )
Functions :
1. Up/Down , Return/Back , Left/Right ,Altitude Hold , One Key Return ,On key take off , Headless Mode etc.(AUTO, Circle, guidance, follow , open-source flight control is stability, can be prepared )
2. RadioLink AT9S DSSS & FHSS hybrid dual-band technology, real-time power position feedback, multi-language menu.
3.pure carbon cover, CNC precision machining.
4.APM2.8 with M7N GPS , cold start speed twice than 6M, 6H . Positioning accuracy of 2.5M, built-in high-precision electronic compass, 56-channel U-blox 7 engine. C / A, BeiDou b1, can be dual-mode at the same time.
Please Note : 1.When you charging ,please don't connect charger with 3S and 4S battery at the same time ,
2. Please don't change parameter and wires randomly , any questions ,please contact us , thank you .
SoftWare :
Software:Mission Planner
Official website address : http://ardupilot.org/planner/index.html
APM is an open source flight control, can you play APM well depend on individual ability. Player must have ability of basic understanding of monolithic integrated circuit, c-language, knowledge of electrical,mechanical, and also needs a certain degree of mental capacity, financialand material resources, energy support.If you're not ready, then We recommend that you prepare some introductory information first.
Package Include :
Frame kit *1
700KV Brushless Motor *4
40A Brushless ESC *4
1555Propellers *2 pairs
Flight Control GPS Set *1
AT9S Transmitter with Receiver *1
Accessories kit *1

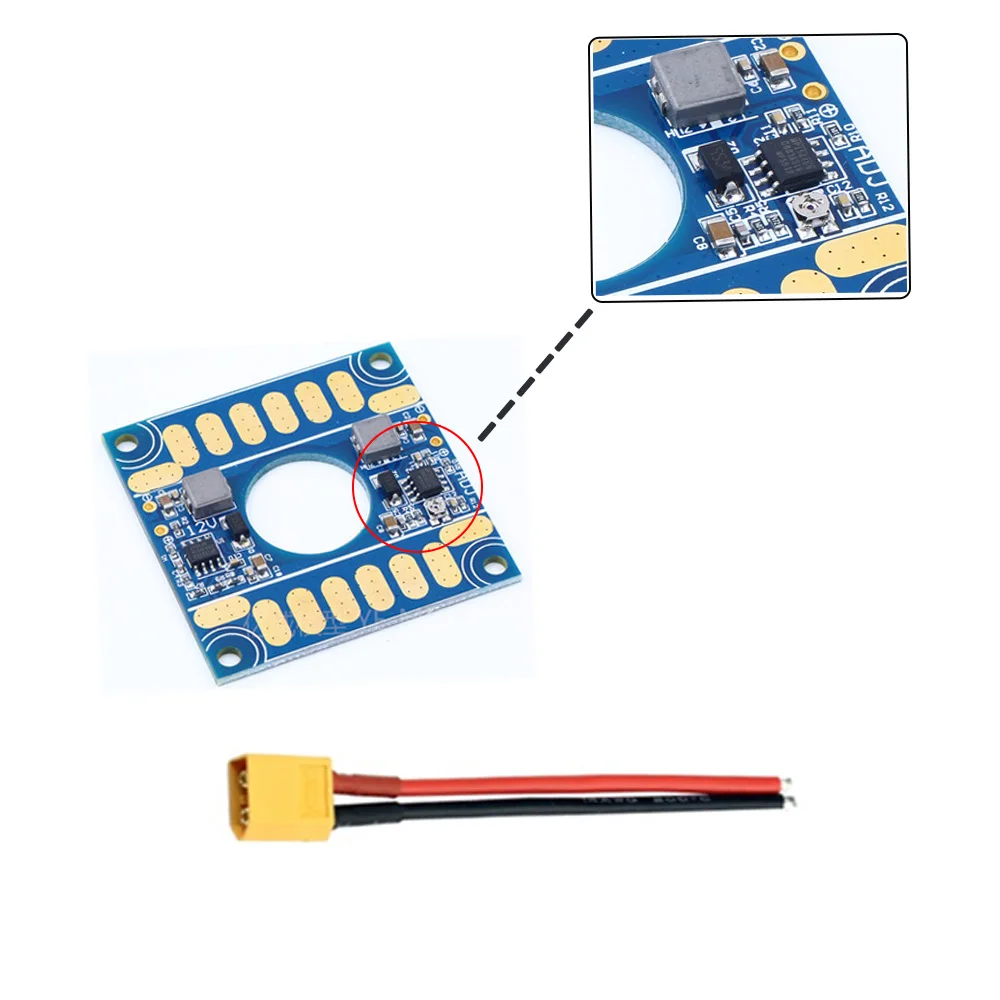
APM2.8 Flight Controller (NO Compass ):
Introduction:
Eliminate V2.52 Version Old 1.0mm 6P SM06B GPS interface , changed to the DF13-4P compass external I2C interface, Place the DF13-5P GPS interface with external interfaces of the compass , more convenient to connections GPS with external compass.
Replaced the V2.52 I2C interface to multi-purpose MUX interfaces, which can be used by the users themselves through the Pad of Back Board freely configurable function output, UART0,UART2,I2C,OSD optional, defaults OSD interface, avoiding 2.52 version when you want to use both Data Transmission and OSD, you need to use Y-line separating the interface programme. Improved OSD interface when used in conjunction with Data Transmission, because of the isolation resistance, more effective to avoid the interference of Data Transmission.
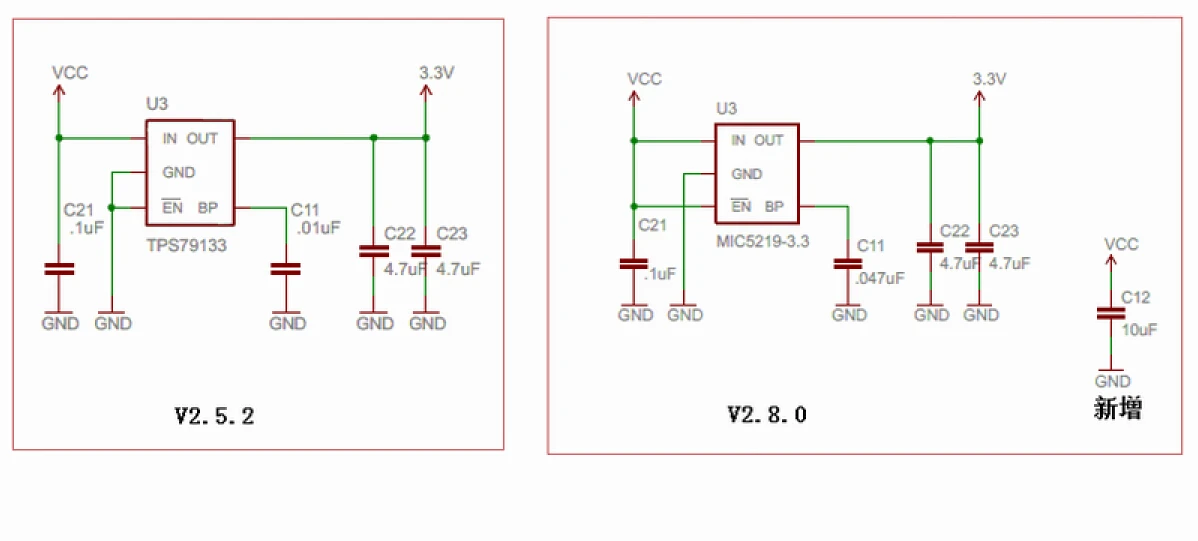
New V2.8.0 use United States semi-LP2985-3.3, pressure-resistant up to 16V, increased reliability, reduced probability of Bad Gyro health due to voltage problems.